Projects
A showcase of my engineering projects, demonstrating practical application of skills and innovative problem-solving.
Download Portfolio
The file above is encrypted. Please use the form on my Contact page to request the password.
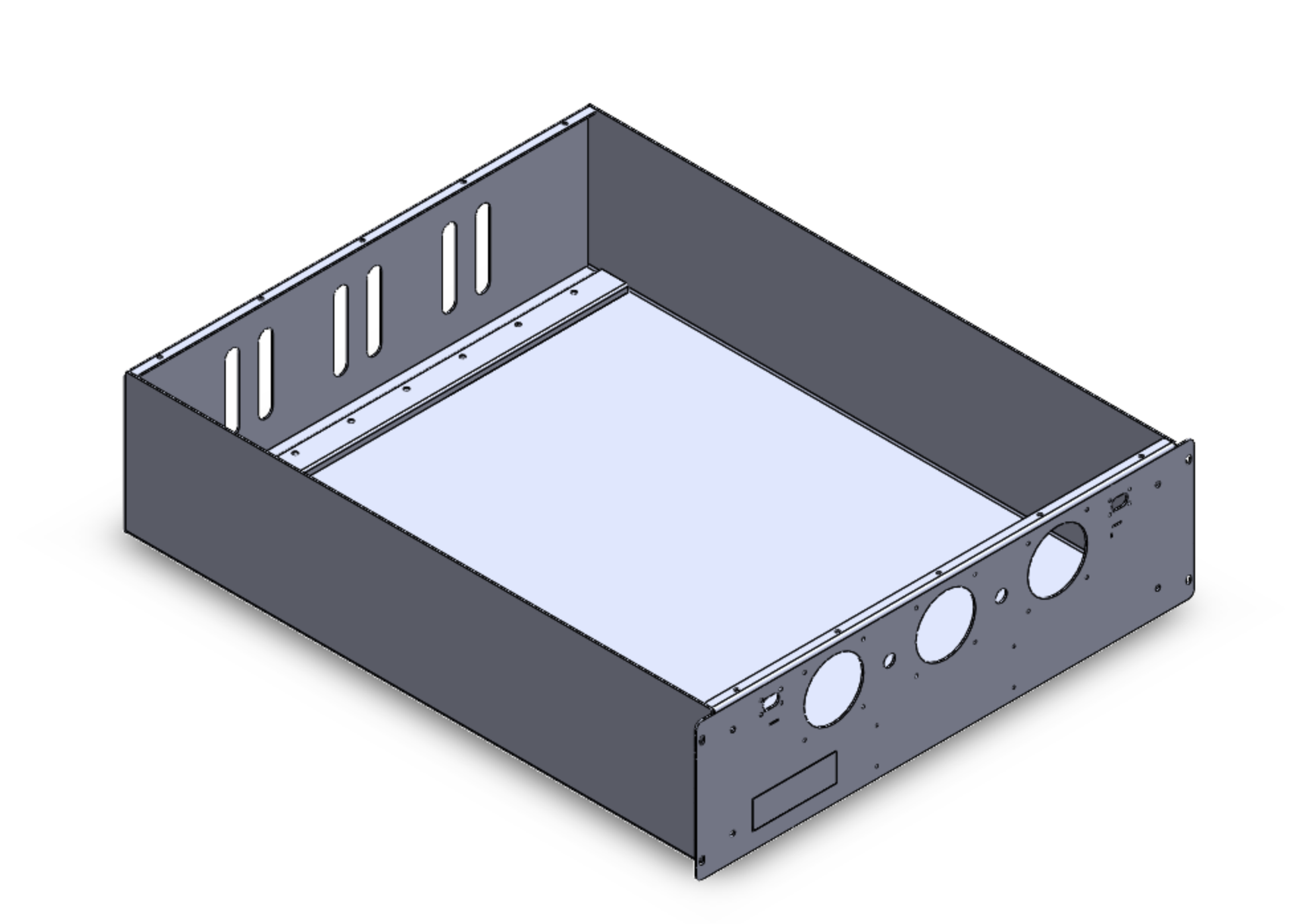
Battery Enclosure Structural Analysis
During my 2nd Co-op at Log9 Materials, I conducted Finite Element Analysis (FEA) on a Battery Energy Storage System (BESS) Enclosure ensure its structural integrity under various load conditions. Using Ansys Mechanical, I simulated stress, strain, and deflection scenarios to identify potential failure points. Based on the analysis results, I added design modifications, on SolidWorks that mitigated excessive deflections, thereby validating the enclosure's strength. This mesh-convergent simulation was crucial in greenlighting the mass manufacturing of the battery enclosure, ensuring it met safety and performance standards.
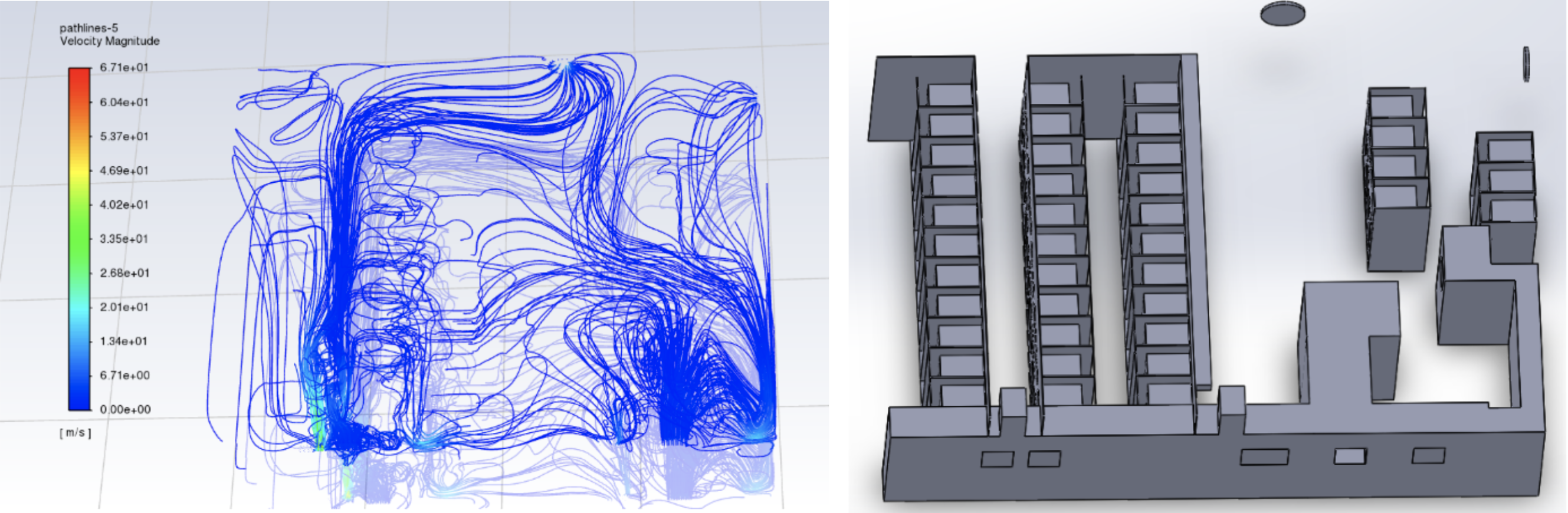
Datacenter Airflow Thermal Analysis
During my HVAC Research Assistant Co-op at Hynes Group, I performed Computational Fluid Dynamics (CFD) analysis on a Datacenter environment to optimize airflow and cooling efficiency. Utilizing Ansys Fluent, I created detailed models of the Datacenter layout, including server racks and cooling units. Through simulations, I identified areas of poor airflow and high thermal loads. Based on these insights, I proposed design changes to improve ventilation and reduce hotspots, ultimately enhancing the overall cooling performance of the Datacenter.
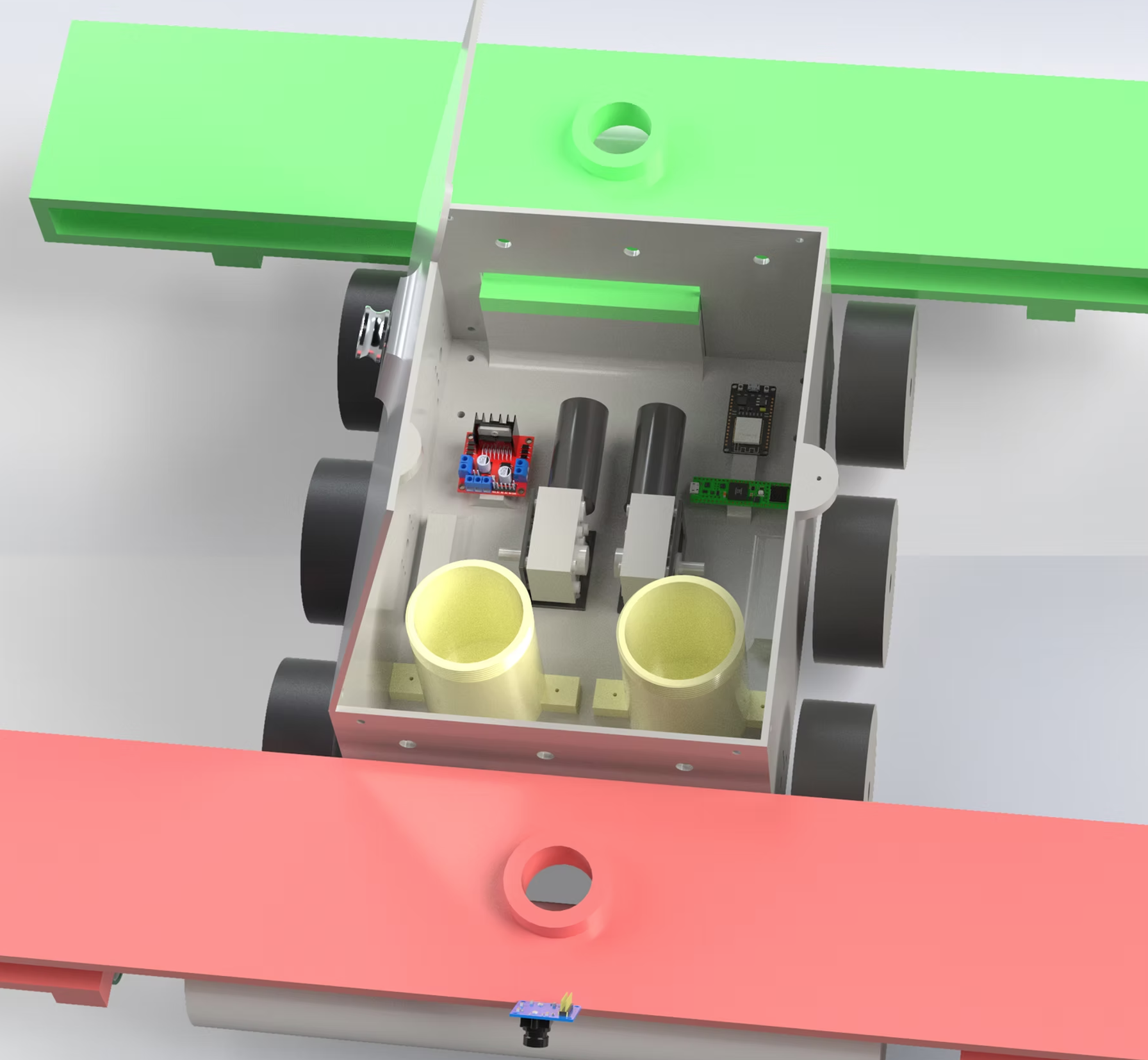
Autonomous Solar Panel Cleaning Robot
As a part of UBC Integrated Engineering's 4th Year Capstone, the team and I fully designed a 12 kg, six-wheel rover to restore and maintain peak solar panel performance. This project recieved a generous grant from the Alma Mater Society (AMS) Sustainaibility Fund. Dust and grime can cut photovoltaic efficiency by up to 30%, so this robot tackles the problem with dual cleaning rollers and a diaphragm-pump spray system, evenly applying cleaning solution through a 110° nozzle. Its innovative Rope & Rail Guidance System, Hall-encoded drive motors, and 3D-printed wheel cores deliver secure traction and precise dead-reckoning navigation—even on slick, angled glass.
Datacenter Human-Machine Interface
Developed and deployed a Human-Machine Interface (HMI) in Beckhoff TwinCAT 3 for real-time control and monitoring of HVAC systems in a live Datacenter (DC-1) as part of a Capilano University–Hynes Group research project. Designed Manual Control, Automatic Real-Time Display, and EtherCAT Diagnostics pages to manage fan speeds, compressor states, and air handling parameters. Implemented user control modules with fault handling, enable logic, and custom alarm visual feedback, integrating branding elements for a professional operator interface. Delivered a production-ready system that enhanced technician usability and enabled direct supervisory control over environmental performance.
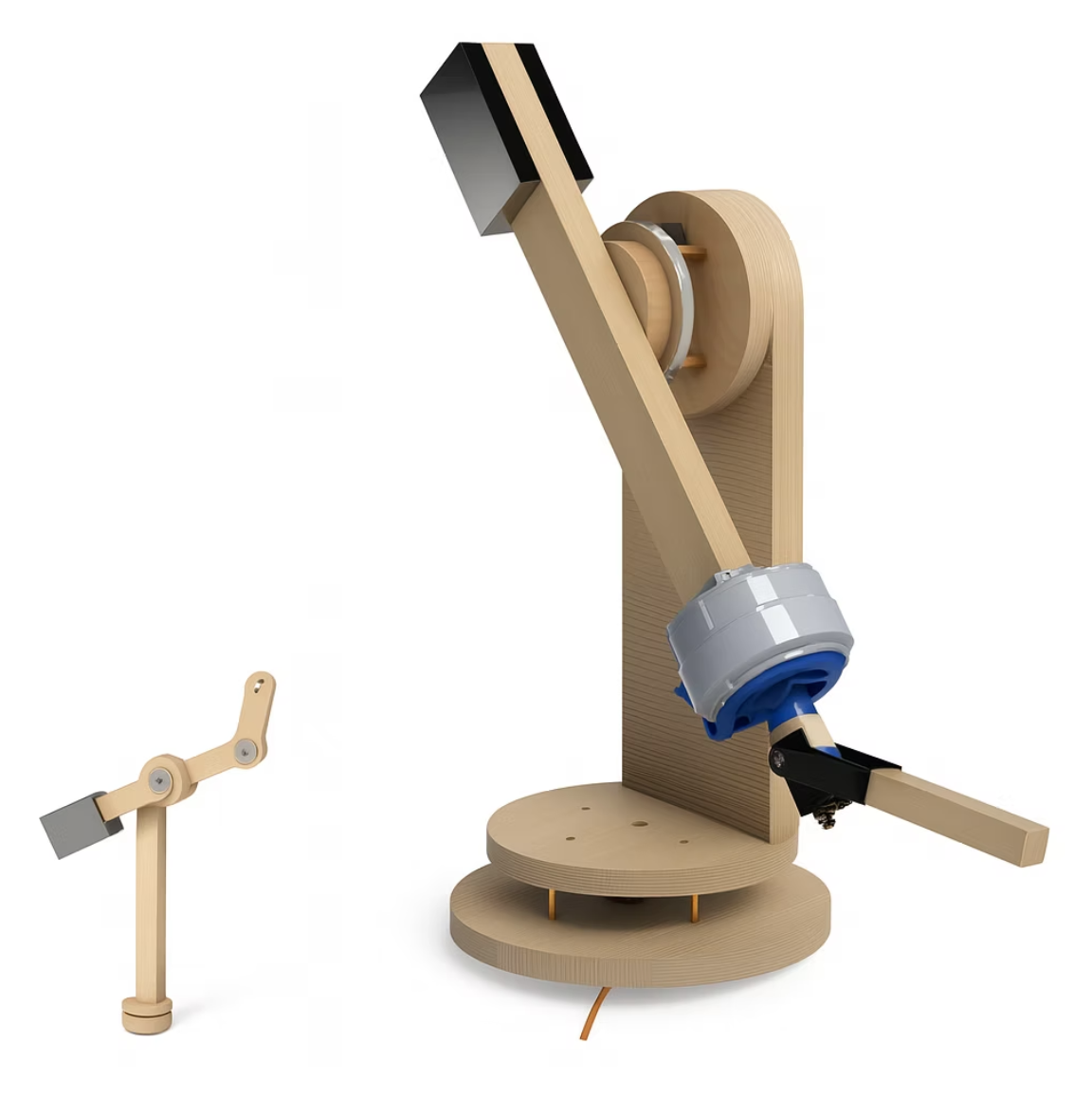
Arduino Robot Muscle
As a part of UBC Integrated Engineering's 2nd Year Capstone, the team and I designed and built a 4-DOF master–slave robotic arm capable of replicating operator motions in <300 ms with ±1 cm accuracy on a $323 budget. Developed a laser-cut tabletop “Master ARM” with potentiometer joints to stream scaled PWM signals to a full-scale “Slave ARM” made of wood/PLA and powered by four high-torque servos on a 7.5 V rail. Engineered a counter-weighted design capable of lifting >400 g at full extension, with each joint achieving ~250° sweep. Delivered a functional prototype meeting all performance specs; planned upgrades include a wearable master sleeve, +2 DOF, and encoder feedback for industrial tele-manipulation applications.
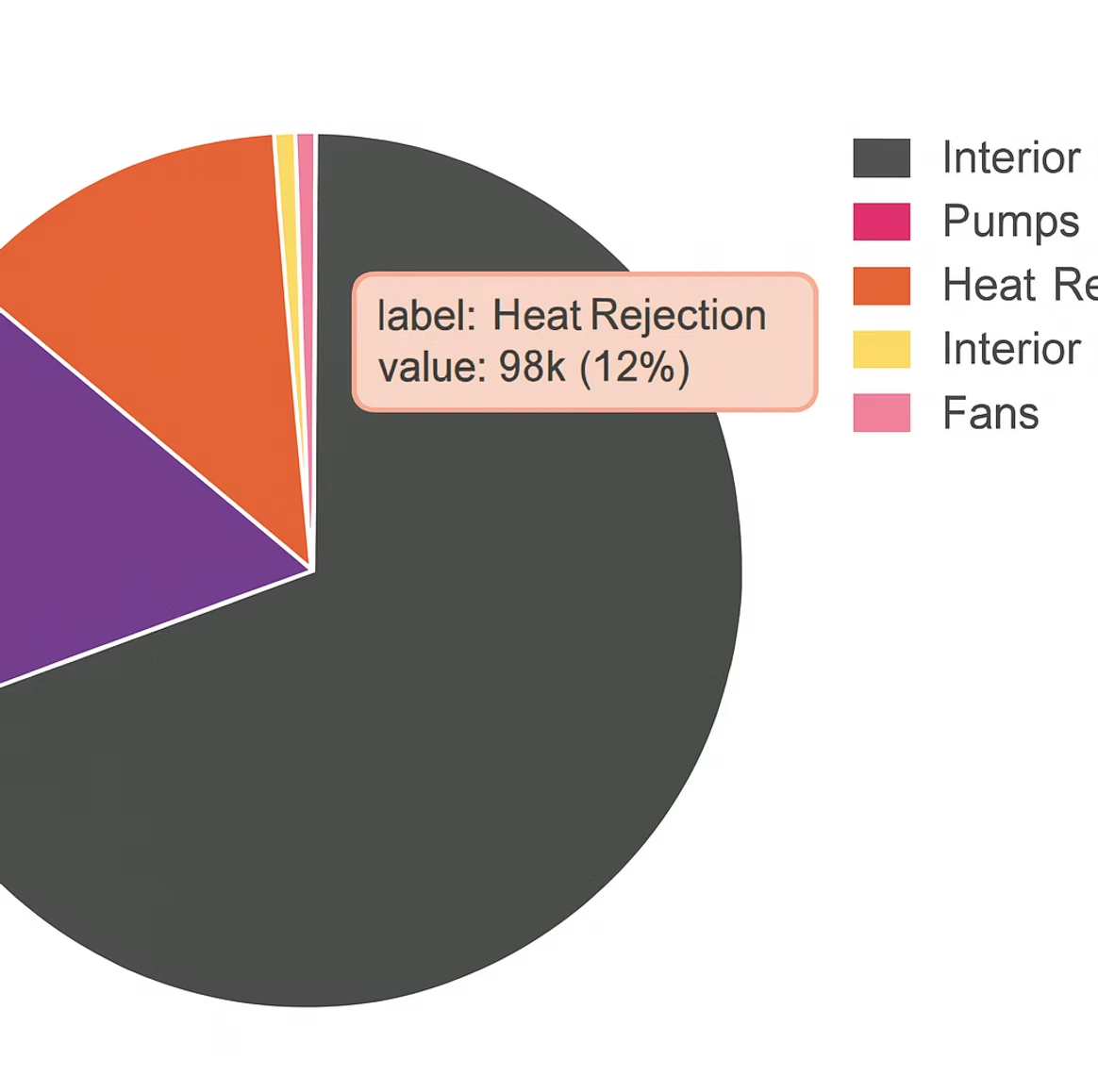
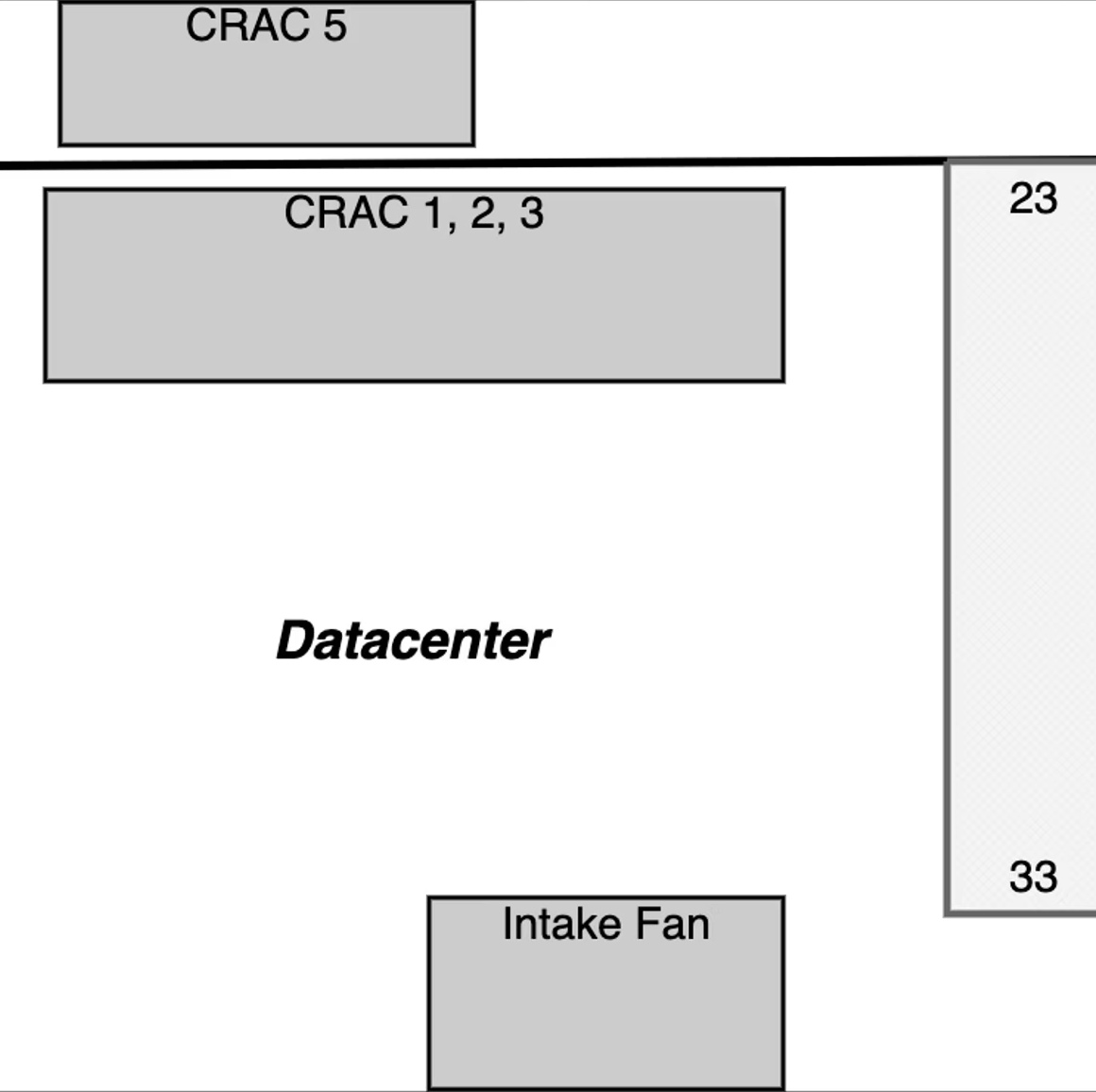
Building Energy Modelling
Simulated air handling units, chilled water systems, CRAH/CRAC equipment, thermal zones, and server heat loads using BIM-aligned layouts. Analysed power consumption, pinpointed high-load equipment, and tested power scheduling strategies, projecting a 12% reduction in facility energy use. Delivered a validated model to support optimisation decisions, with scope for CFD and HMI integration.
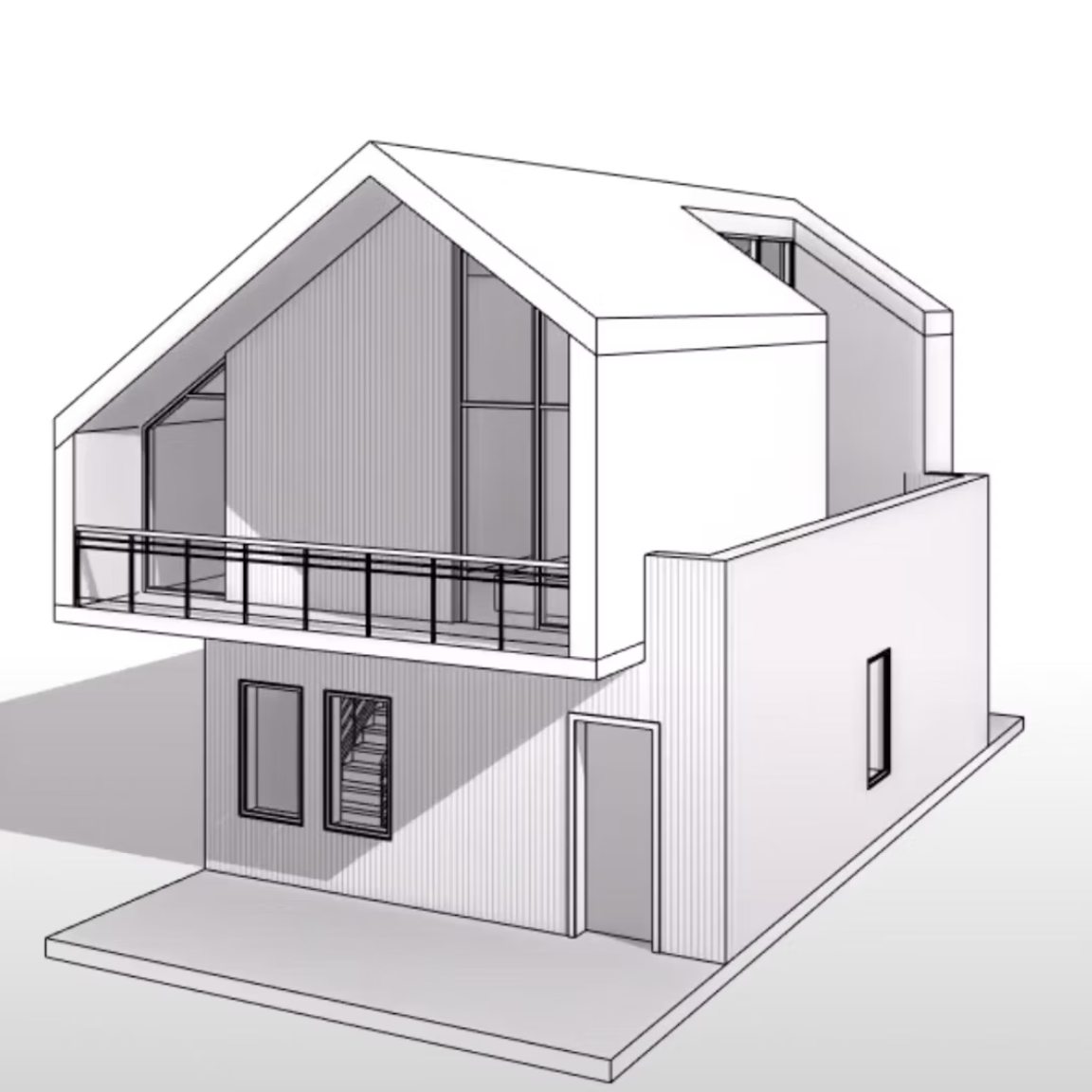
Floor Plan & Building Information Modelling
This section includes personal Floor Plan Layouts I have drafted in AutoCAD and also results of Building Information Management (BIM) using Autodesk Revit. I believe this highlights my self-starter philosophy and illustrates my ability to adapt and assimilate quickly with different technologies.